











履帶機器人驅動電機參數
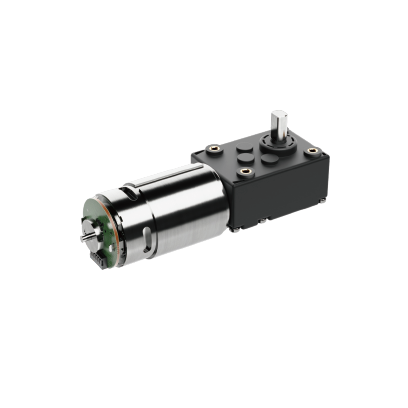
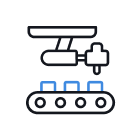
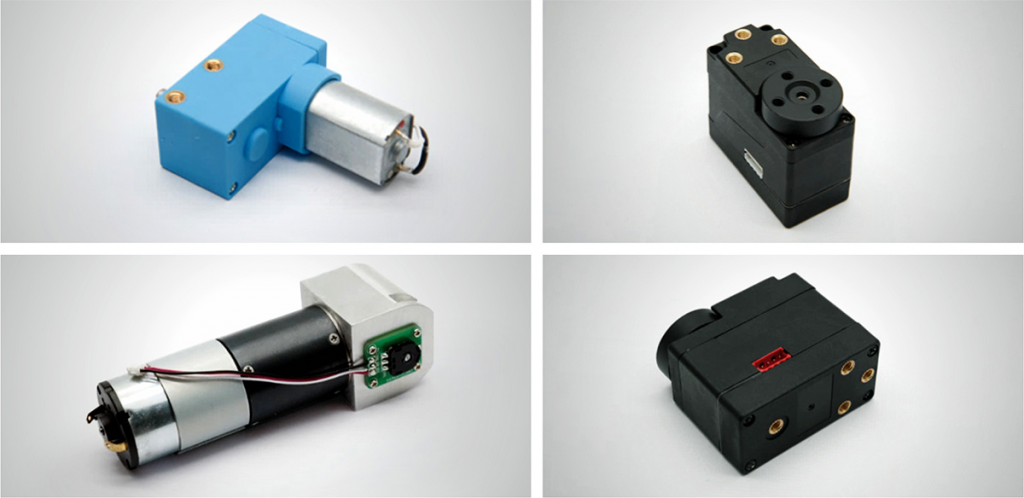
履帶機器機器人結構對稱分布,車體兩側安裝履帶及腿移動機構,電機、驅動機構、減速裝置安裝在車體內部。履帶本體外裝有緩沖筋條,可以減緩履帶行走過程中的沖擊,提高履帶行走的平穩性,并可延長履帶的使用壽命。履帶腿機構可以繞轉軸旋轉,根據不同的地形形成不同的機器人構型,以更好的適應復雜的地形環境。當在機器人在較為平坦的地面行駛時,履帶腿機構與本體重合,可以減小機器人行走過程中的阻力;履帶移動機器人具有牽引力大、不易打滑、越野性能好等優點,可以搭載攝像頭、探測器等設備代替人類從事一些野外探險、科研工作。履帶機器人驅動電機是一種小功率微型驅動電機,輸出功率在50W以下,電壓在24V以內,具備驅動,減速功能,主要驅動結構由驅動電機、齒輪箱組裝而成,驅動電機可采用直流無刷電機、直流有刷電機、步進電機、空心杯電機等微型電動機作為驅動源,減速齒輪箱可采用行星齒輪箱、圓柱齒輪箱、平行齒輪箱、蝸輪蝸桿齒輪箱等定制開發齒輪箱;通常采用定制參數,例如電機類型,直徑規格,電壓,電流,功率,齒輪箱結構,減速比,扭矩,輸出轉速等參數是按需定制;兆威公司致力于研發、設計、制造智能機器人驅動電機齒輪箱產品,可按照需求定制產品參數。
履帶機器人驅動電機參數:
材質系列:塑膠行星齒輪箱、金屬行星齒輪箱
直徑規格:3.4mm-45mm
輸出力矩范圍:1gf-cm至50kg-cm;
減速比范圍:5-1500;
輸出轉速范圍:5-2000rpm;
定制機器人開發案例:
產品名稱:機器人關節齒輪箱
產品分類:智能機器人驅動齒輪箱
電 壓:3V-24V
工作溫度:-30……+100℃
直徑規格:3.4MM到45MM
噪音:穩定后低于42db(250px距離)
項目說明:為適應現代高科技研制的各種類型的機器人關節需求,我們生產的機器人關節齒輪箱產品規格有3.4MM到45MM不等;為解決舵機齒輪的設計及制造精度、舵機的回程差的控制,根據公司多年的研發設計經驗結合機器人關節的市場需求優化了舵機齒輪的設計及制作精度,降低回程差。