











機器人差速減速機原理
2021-2-5 04:00
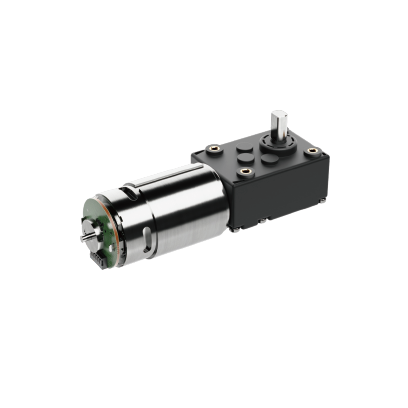
機器人差速減速器主要由太陽輪,行星輪、內齒圈及行星架構成,它的三個行星輪載荷均勻分配,采用齒式浮動機構,即太陽輪或行星架浮動,或太陽輪與行星架同時浮動。減速器中的齒輪為直齒漸開線圓柱齒輪,它具有重量輕,體積小,驅動良好、驅動范圍大、運 行平穩、噪聲低等優點。目前的集中差速減速機,太陽輪與軸鍵接,內齒圈與外齒輪通過螺 栓及銷子聯接成整體,內齒圈通過外齒輪轉動,太陽輪與內齒圈同時轉動帶動行星輪,行星輪通過銷軸傳給輸出軸。
機器人差速器減速機內部是一種行星齒輪機構,其中包括兩個行星齒輪和兩個與驅動軸相連的半軸齒輪,這四個齒輪配置在差速器的一個內部殼體內,并且相互之間互相咬合在一起,每個齒輪都咬合著另外兩個齒輪(每個半軸齒輪都咬合兩個行星齒輪,而每個行星齒輪又咬合兩個半軸齒輪),所以只要其中一個齒輪轉動,勢必會牽動其他三個齒輪一同轉動,而其中一個半軸齒輪朝某個方向轉動時,另外一側的半軸齒輪勢必會向反方向旋轉,這個現象可以通過實驗證明,當把車輛的兩個驅動輪懸空,轉動一側的車輪向一個方向旋轉勢必會使另一側的車輪往反方向旋轉。

在線留言 MESSAGES