











差公式自適應管道機器人的驅動特性研究
2021-2-23 05:36
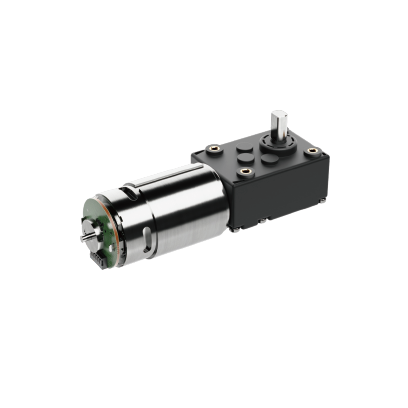
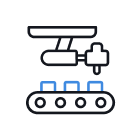
為解決管道機器人過彎時驅動輪與管壁間的相對滑動問題以及機體對管徑尺寸的適應問題,設計了采用一個電機進行驅動并具備差動能力和自適應變徑尺寸的適應能力的管道機器人。分析了機體差動機構的驅動特性,理論推導了管道機器人變徑機構工作狀態時的受力方程,得到了機器人運行時驅動輪與管壁之間的力學關系式。構建了機體管內運動模型,并分析了機體在不同位置條件下,模型中各輪的運動參數變化情況。建立機器人在組合管中運動的虛擬樣機模型,通過仿真實驗對機體的差動特性進行了驗證,結果表明機器人可以無干涉過彎,并展現出了良好的驅動性能。
圓柱管道在生產生活中被應用,適應圓柱管道的機器人運動方式有輪式、蠕動式、履帶式和行走式等多種類型,其中輪式為常見。近年來,外學者先后研制出各種針對圓柱管道的機器人,如中國科學院沈陽自動化研究所和東京工業大學分別設計了旋轉驅動管道機器人,此類機器人采用輪部螺旋運動方式帶動機體在管內行進。

在線留言 MESSAGES